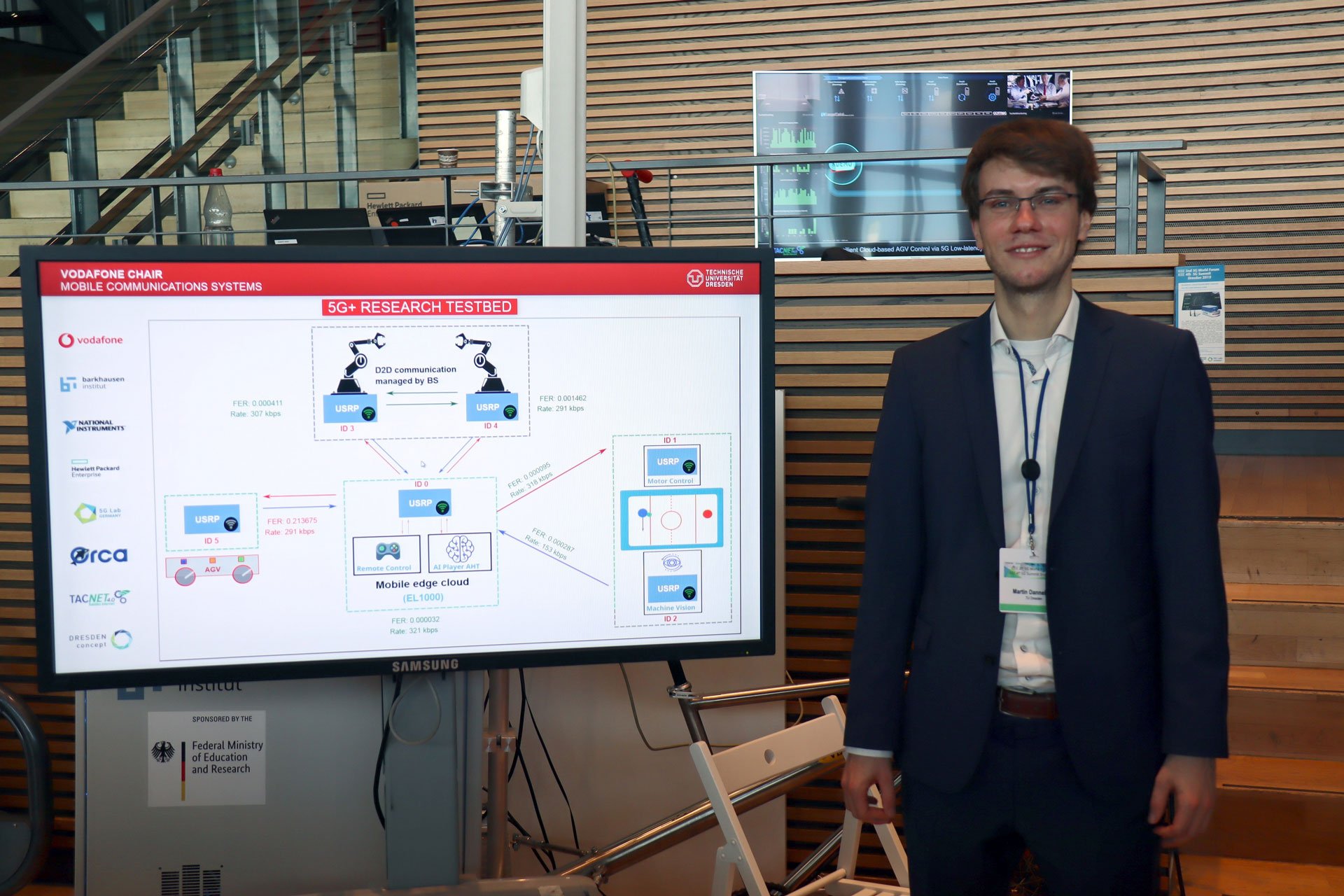
The central element of the overall demo is a base station with an attached cloud computing platform. This base station is mounted inside a bicycle rickshaw for quick deployments and tests in industrial or outdoor scenarios.
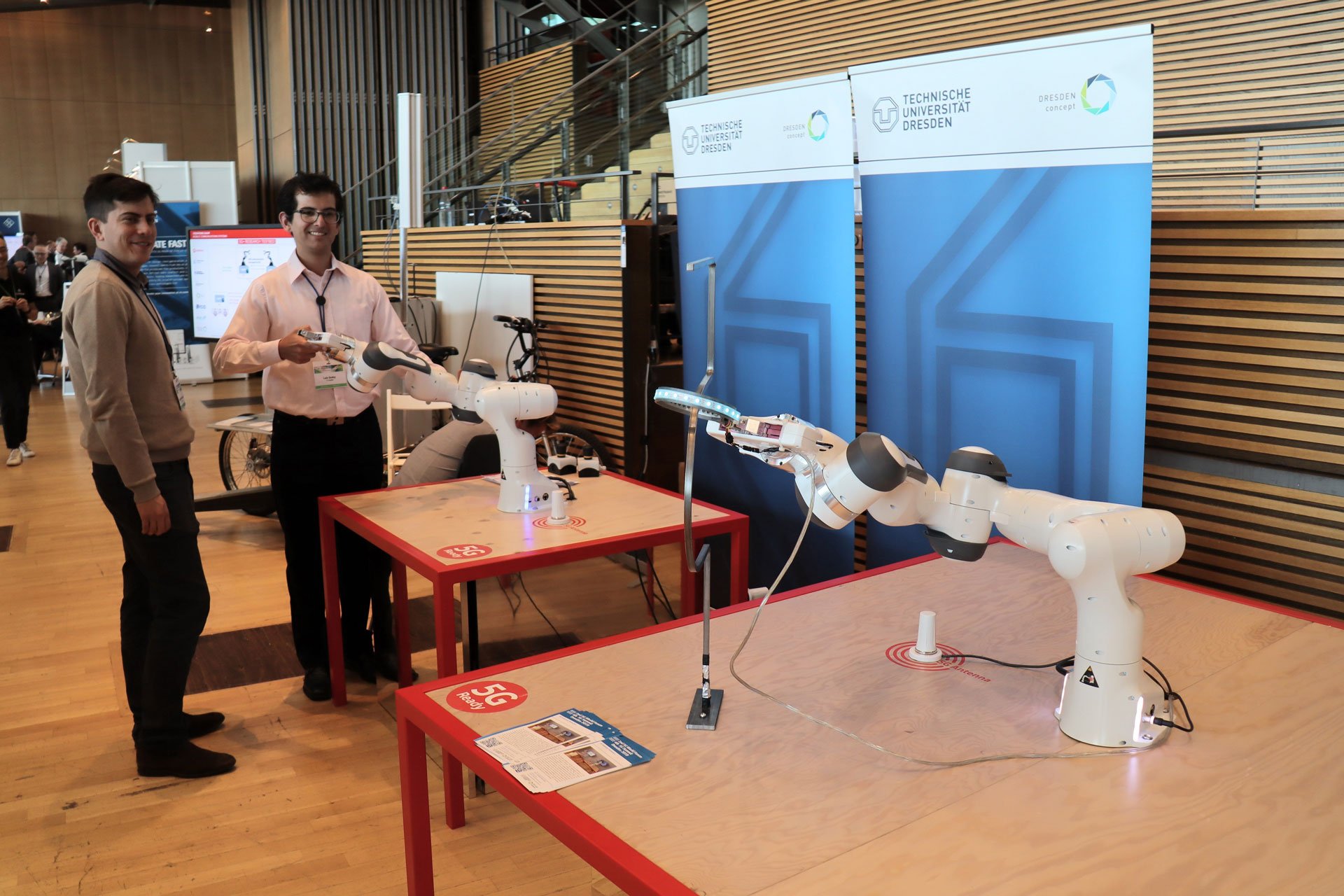
In the demo all 5 devices/clients are controlled by this base station. One pair of devices belong to the industrial robot arm demonstrator, showed in the year 2 review meeting. (https://www.orca-project.eu/orca-demo-on-tv/) The next pair of devices are used to connect the air hockey table of the Barkhausen Institut. Finally, one USRP-device is mounted inside a moveable platform used for transportation tasks on factory floors. For the overall set-up to work, the prototype base station has to provide low latency cloud access to all clients. This is achieved by the open source physical layer implementation (http://owl.ifn.et.tu-dresden.de/) developed by the Vodafone Chair in the ORCA project. Every client is served with a round trip time of 1 ms and very low jitter. In addition, separate time slots are scheduled by the base station for a device-to-device communication link between the two robot arms.
During the conference, the visitors could experience the capabilities of low latency networks in several ways. Besides the two robot arms, the air hockey table allows to play against a AI controlled robot. Here a camera captures the position of the hockey puck and transfers it to the cloud. In the cloud not only a defensive, but also a attacking strategy is calculated. After the respective motor control commands are transferred to the X-Y table like robot, it will try to score a goal.
The moveable transport platform (https://www.goetting-agv.com/kate) brought in by the TACNET project can be controlled either manually via a joystick or by a cloud application developed by the Deutsche Telekom Chair of the TU Dresden.